I was looking for a smaller multirotor to practise flying in small airspace, indoors or in my garden.
Soon I found the Snelflight Quadpod
I ordered the Quadpod at the end of last month on a Friday and next Tuesday the postman delivered a small box.
The Quadpod came with a well organized manual and building it required no soldering.
Soon I found out that one of the motors was not working.
Mr. Jermin from snelflight.co.uk sent me a replacement, but this time it took way longer to arrive here.
I set up the Quadpod with the new motor and it looked much better.
The manual suggests testing with the radio before adding the props.
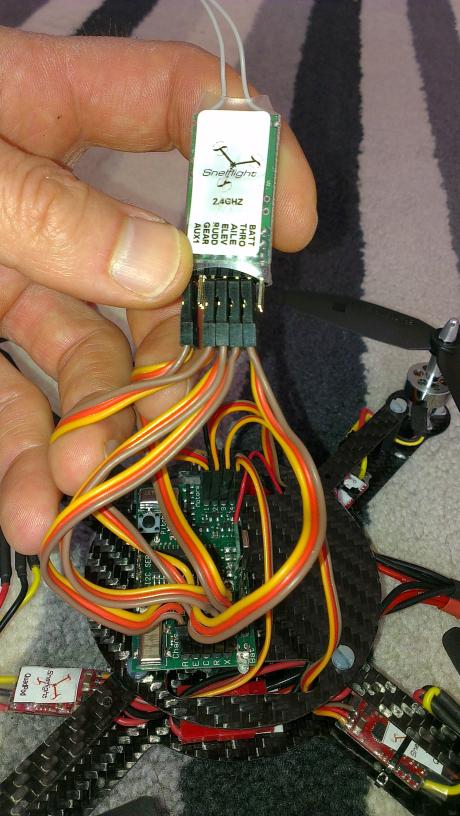
I wired up the receiver with the controller board and configured the Spektrum DX7 as suggested and all looked fine - so I added the props, eager to see the Quadpod hover the first time.
I started the motors and rechecked the rotation. Adding a bit more throttle I expected the Quadpod to hover, but it flipped right away.
|
Ok, back to the workbench. I verified the setting I have with the manual which mached, but the Quadpods moves did not make sense.
Eventually I had the the settings of the RC as pictured on the right.
I never changed reversal of channel one (throttle) as throttle was working fine from the beginning.
The connections between the receiver and the controller board are as follows:
| RX | Controller |
| Throttle | C |
| Aileron | A |
| Elevator | R |
| Rudder | E |
| AUX1 | X |
That crossing of Rudder / Elevator was unexpected - maybe I did not initialize the model slot on the radio correctly or this is just how it is to be set up in mode 2
Whatever the reason, that's how I have set up the MikroKopters and I want the Quadpod to have the same control sticks, of course.

|

|
|
During further tests the Quadpod suddenly jumped up at me while I was kneeling on the carpet. It slapped my knee and kinked a prop.
As I purchased a spare set of props I did not expect troubles - in the past I broke a propeller or two already - and I replaced the prop and tried again.
Now I have the same problem as with the dead motor - one of the four props does not work correctly.
I have tested the motor with a multimeter, all wires have about 1.8Ω which is probably ok. There is no visible mechanical damage and when manually rotated behaves just like the other three.
|
|
I connected the motor controller with another motor to make sure it's not the controller
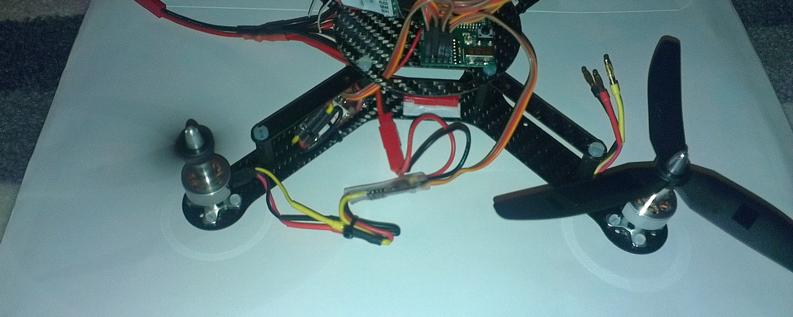
the controller is fine.
Looks like I need another replacement motor.
The video below shows how the motor is behaving now.
All of this is quite frustrating.
I have time this month to practise flying, the weather is fine, but the Quadpod - which should have been set up easily - is still not functioning as expected.
I'm not blaming anybody, I'm just a bit dissapointed.
QuadPod part 2