|
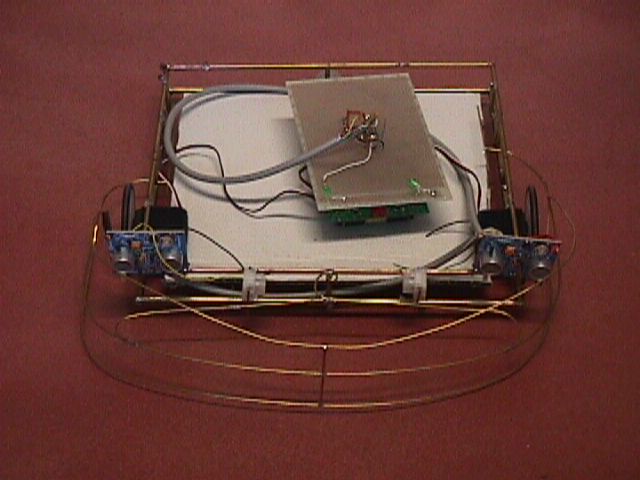
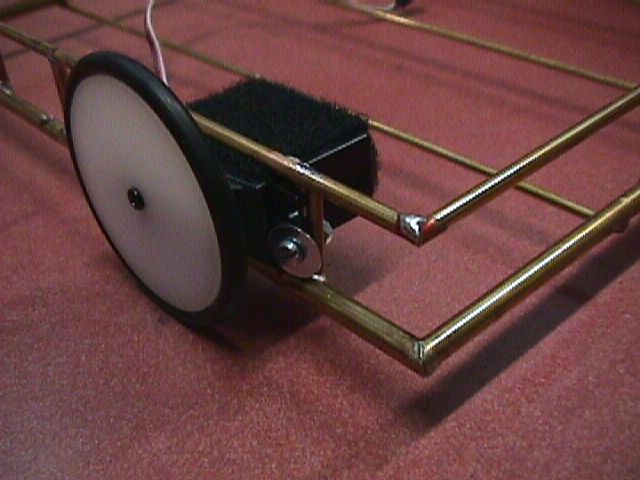
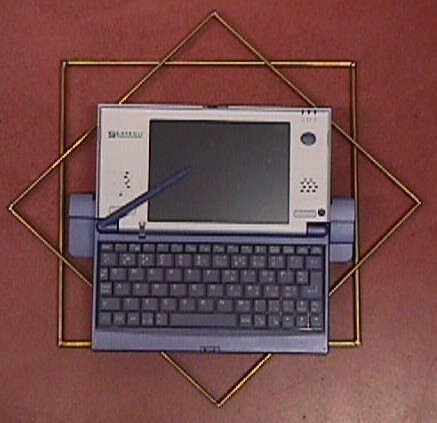
home/ history/ 1999/ construction_html I was working on a new WebTruck version (1999)obsolete project
Building...[I had big plans back then - and I started with building a frame. It could do what GrowBot did before, but nothing more - and the laptop was not running long enough to do anything useful] I am working on a new WebTruck version. This one will be completely wireless and offer at least as many features as there are now. I had to redesign the frame. The design with casters in front and at the back if often used, but the risk of getting wheels off the ground is too big. I will use 4 servos. They will work in pairs, so for the control there is no difference to the 2 servos 2 casters concept. Here you see the GrowBot on it's new platform. Here I have 2 bumbers, 2 ultrasonic sensors and 2 light resistors. In this setup Webtruck NT drives around nicely and never gets stuck, although the back sometimes hits when turning. I will add a IR sensor, some more bumpers, more light resistors, batteries..., the laptop with camera and the wireless connection. I plan to use the laptops USB for the camera, the serial line for input from Growbot, the parallel interface for output to the Growbot and the PC-Card slot to get network access. New Wireframethis was actually driving like this, with the GrowBot board controlling the 2 servos, 2 distance sensors and 2 bumpers New Wireframe with Servo mounted A study of how to place components for a while I was considering a octaconal structure with coasters on 2 upper corners and servos on 2 other corners Layout study with notebook, batteries, camera, controller board |