|
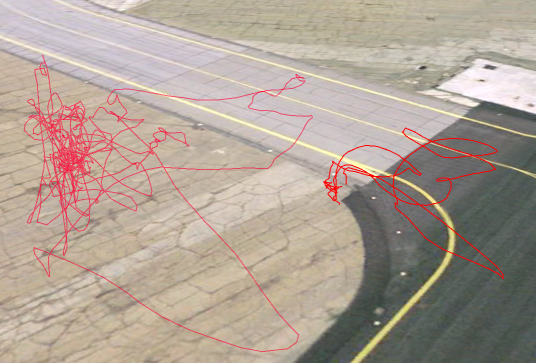
home/ history/ 2010/ february/ 20100225 Feb 22thSome recordings from the GPS module, converted to KMZ and moved to a more suitable location than where I was flying. 2010-02-22 see in Google Earth | Maps as this is 3D data, it makes more sense to view it in Google Earth
Feb 25thGPS/WaypointsHaving again a bluetooth serial connection to the kopter, I wanted to try the GPS waypoint feature. Powered the kopter, the RC transmitter and the laptop. On the laptop, I started the MK-Tool, the application to control and program the kopter. GPS was getting the position quickly and my prepared image with GPS coordinates showed fine in the MK-Tool, the kopters position was correct. I set one waypoint about 20m away over the neighbours house and started the kopter. Conditions were not very good for testing, the wind was coming in bursts, but the kopter held the position pretty well in position hold mode. Activated the waypoint and the kopter went over to the neighbour. The target radius was set to 10m, pretty generous. The kopter did not seem to reach the position and I activated position hold and flew back to me. Just when I started to fly back to me, the laptop confirmed that it had reached the position with a sound. Flew around some more and landed. The application on the laptop was crashed and I was unable to restart it. So I removed the bluetooth device from the kopter and switched off the laptop as I did not want to risk malfunction due to weird laptop behaviour. GPS recordingI have changed the settings.ini on the card for the kopter to record a GPX file as well, as there is much more information in that file. The kopter did not record anything. The current settings are: KMLLogging = 500 GPXLogging = 1000 On the previous flights with successful KML recording, the settings were (default) KMLLogging = 500 GPXLogging = 0 Tilt/Pan camera mountOn the first flight, I had a interval program on the Ixus70 which takes three images in a row with different exposure times. It was set to 1/500th, 1/800th and 1/1000th with ISO 80. Most of those images were underexposed. Most times the camera set F/8, the few with F/2.8 look ok and crisp. I changed to the interval program I had used before, which leaves more freedom to the camera for its settings. These shots are between 1/125th and 1/500th at F/2.8 and most of the came out fine. That was the first time I flew this camera mount and I wanted to see how the behaviour of the kopter is, taking pictures was not so important. While the camera mount was keeping the camera level in almost all situations (or whatever angle I set it from the transmitter), I don't think the current solution is useable for video. The whole mount seems to vibrate too much and the servos add to that. I will try with the Ixus 200is - the one that failed terribly with the first kopter and foam material camera mounts.
Picture taking seems to work - now it's time to start flying in the area where the first kopter went down and take lots of pictures of roofs and trees... Building the Hexakopter | GPS recording in Gusty Wind |